Wir verwenden Cookies, um Ihre Erfahrung zu verbessern. Um der neuen e-Privacy-Richtlinie zu entsprechen, müssen wir um Ihre Zustimmung bitten, die Cookies zu setzen. Erfahren Sie mehr.
Bestellnummer
Ungültiger Bestellcode
| Menge | Stückpreis |
|---|---|
| 1+ | 83,17 $ |
| 10+ | 63,68 $ |
| 20+ | 54,32 $ |
| 50+ | 45,37 $ |
| 100+ | 40,17 $ |


Merkmale:
- Stark miniaturisiert: 6.8 x 9 x 1 mm
- Ausgänge A quad B
- Robust gegenüber Öl, Fett, Flüssigkeiten, Staub, Partikel
- Programmierbare Auflösung und Maximalgeschwindigkeit
- Auf Wunsch mit Halter, Kabel und Stecker
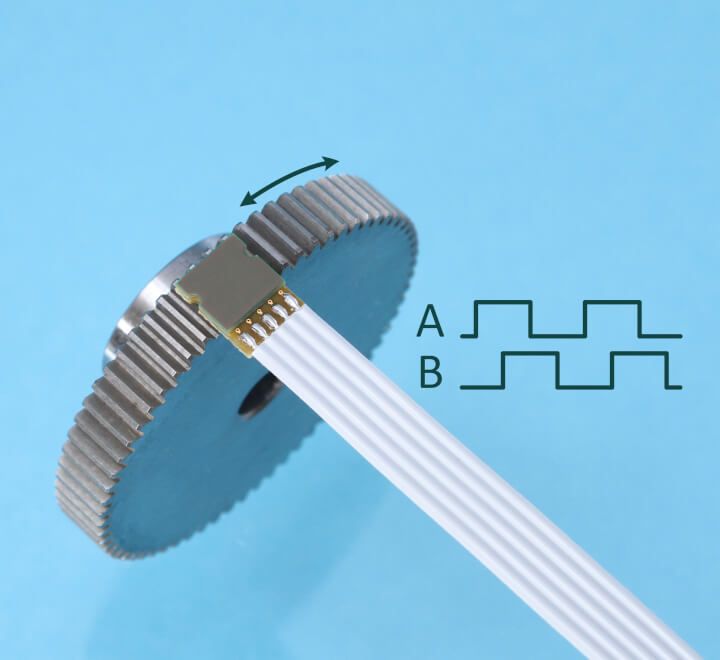
Der Induktiv Drehzahlsensor ID1102G besteht aus einem Sensor und einem Zahnrad. Der Sensor ist eine integrierte Schaltung in einem PCB-Gehäuse und liefert A- und B-Ausgangssignale in Quadratur. Das Zahnrad mit Module 0.5 besteht aus ferromagnetischem Stahl.
Die Auflösung und die Maximalgeschwindigkeit des Drehzahlsensors sind frei programmierbar oder können ab Werk programmiert werden.
|
Ausgangssignale |
A quad B |
|
Interpolation |
bis x16’384 |
|
Zähnefrequenz |
0 bis 25 kHz |
|
A/B Frequenz |
0 bis 1 MHz |
|
Versorgung |
5V, 10 mA |
|
Temperatur |
-20 bis 100°C |
|
Luftspalt |
0.1 – 0.6 mm |
Der Induktiv Drehzahlsensor ID1102G kann mit einem Zahnrad aus ferromagnetischem Stahl und mit Modul 0.5 betrieben werden. POSIC verwendet Zahnräder der Firma NOZAG, das Datenblatt dieser Zahnräder befindet sich unter Downloads.
Der Sensor ist nicht für den Betrieb mit nicht-ferromagnetischen Getrieben vorgesehen.
Der Sensor ist nicht für den Betrieb mit Zahnräder mit Modul <0,4 oder Modul > 0,6 vorgesehen.
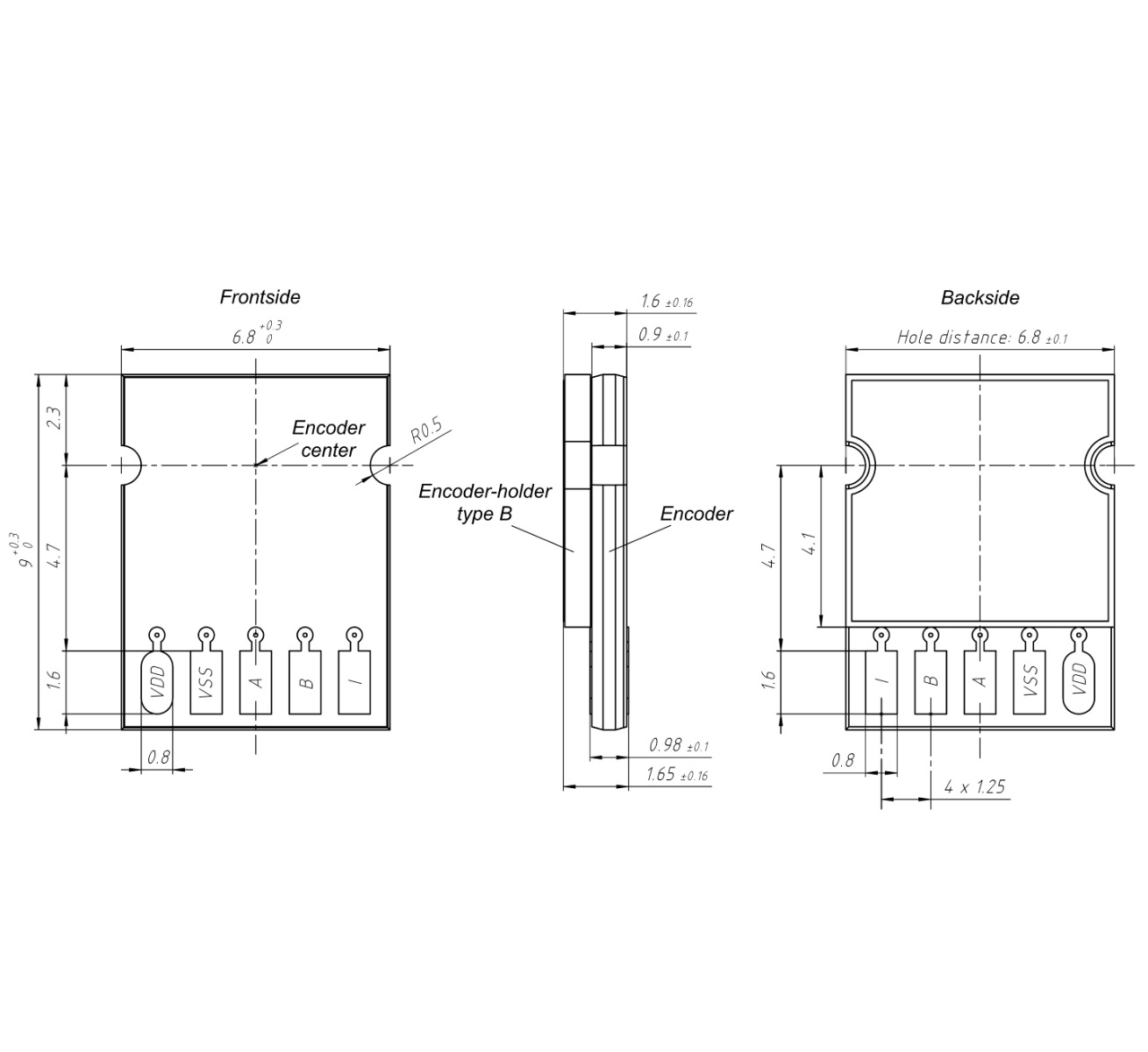
Dimensionen (mm) des ID1102 Encoders auf einem Encoder-Halter Typ B.
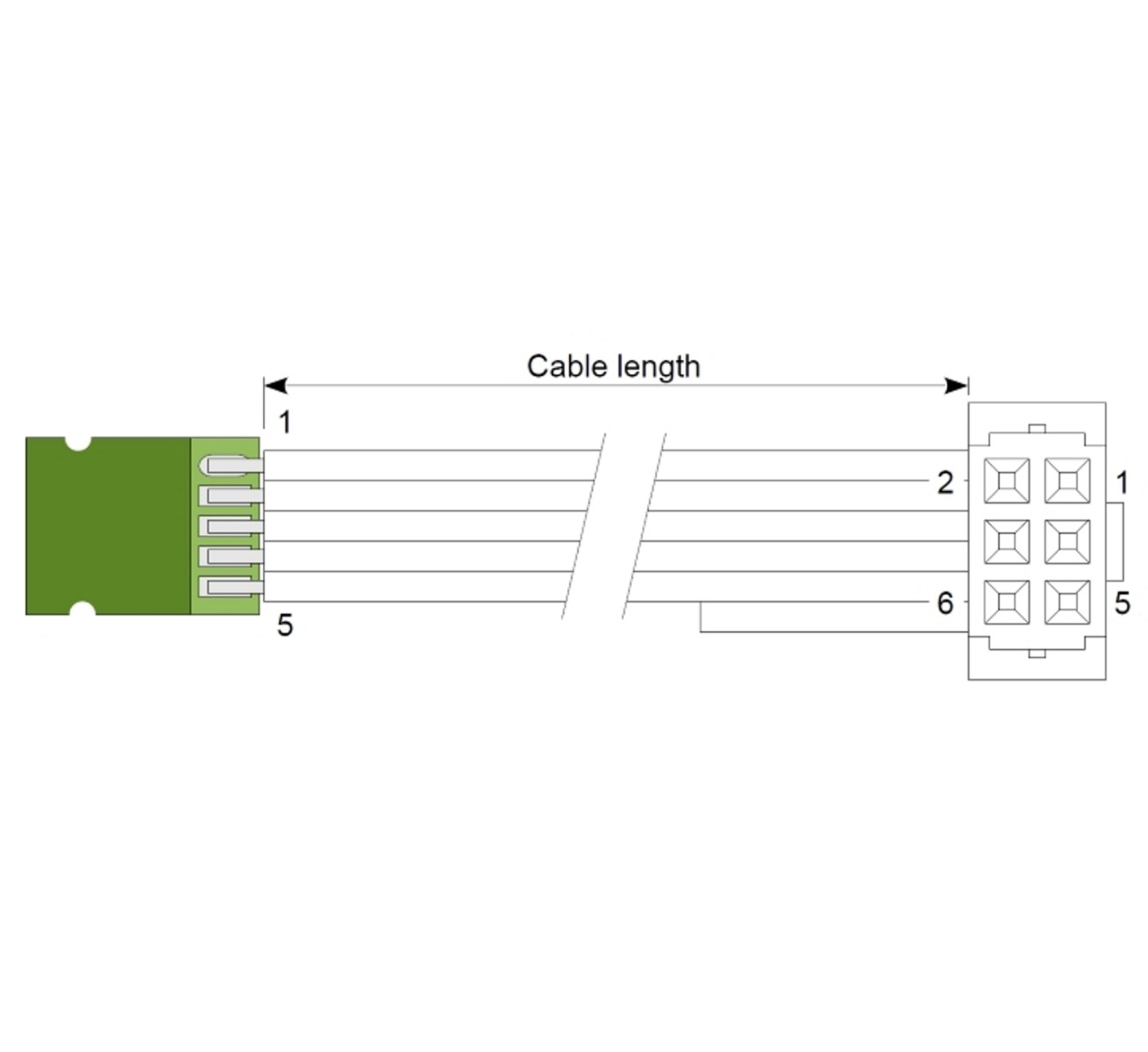
Encoder mit Flachbandkabel (Raster 1.27 mm) und 6-pin DIN41651 Stecker.
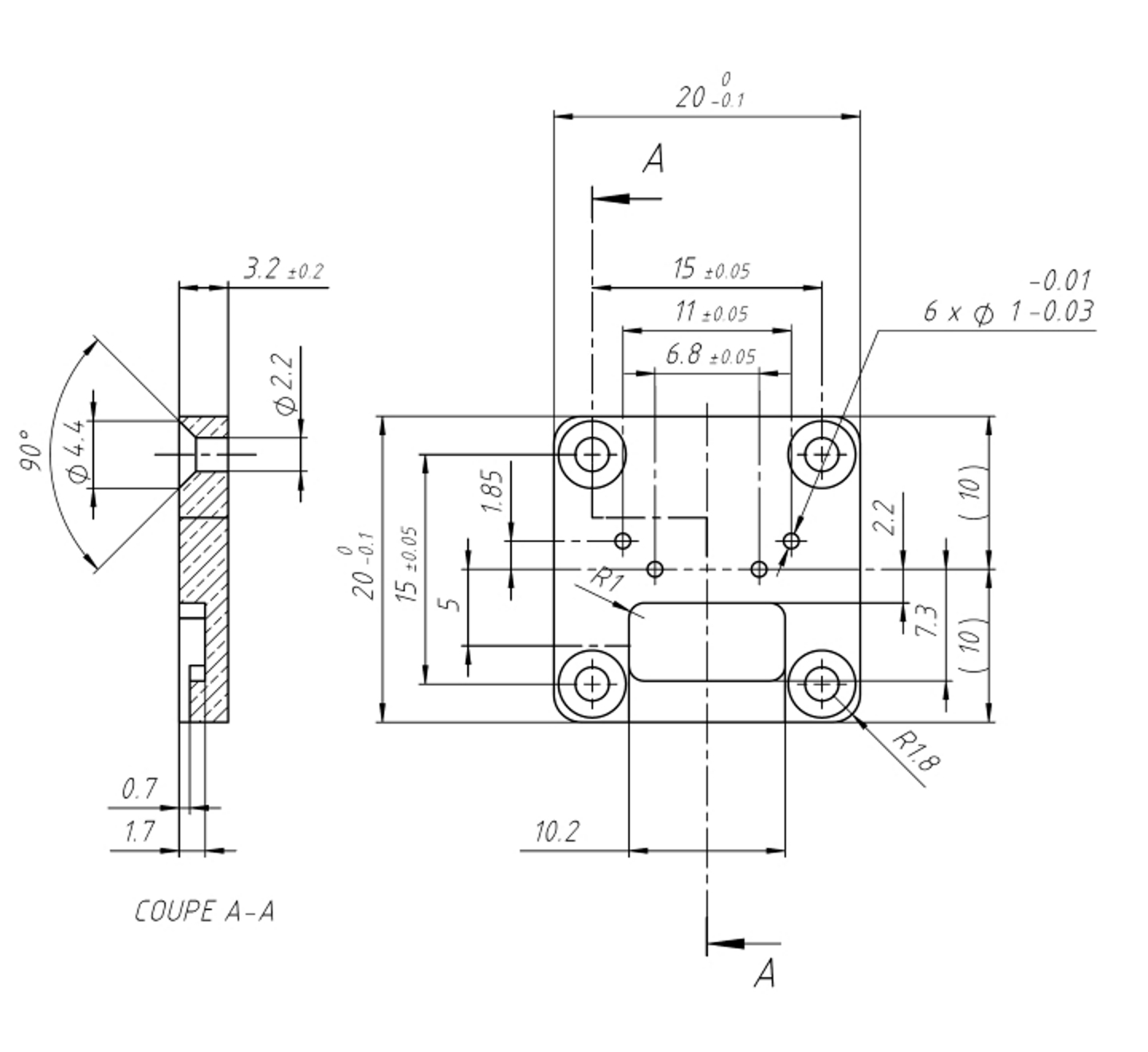
Abmessungen (mm) des Encoder-Halters Typ A. Dieser Halter ist nur zur Evaluierung als Teil des Evaluation & Programming Tools erhältlich. Für eine Serienproduktion mit Halter Typ A, wählen Sie bitte den Encoder ID4501.
Verwandte Produkte



